




成本杀手 · 性能越级
Cost Killer, Performance Leap
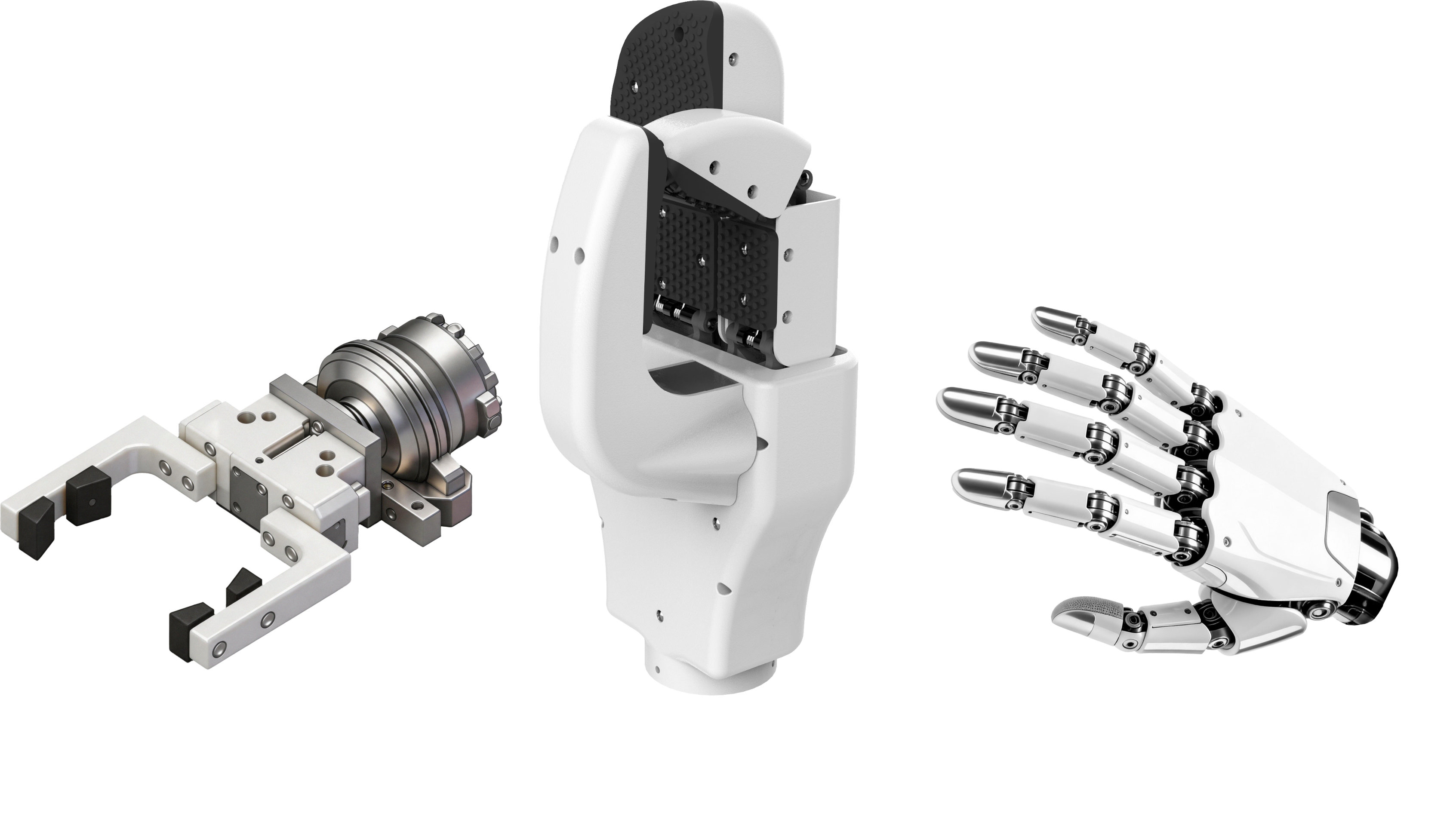
OmniT-Hand VS 两指夹爪
加「量」不加价,从「夹」到「抱」的跨越
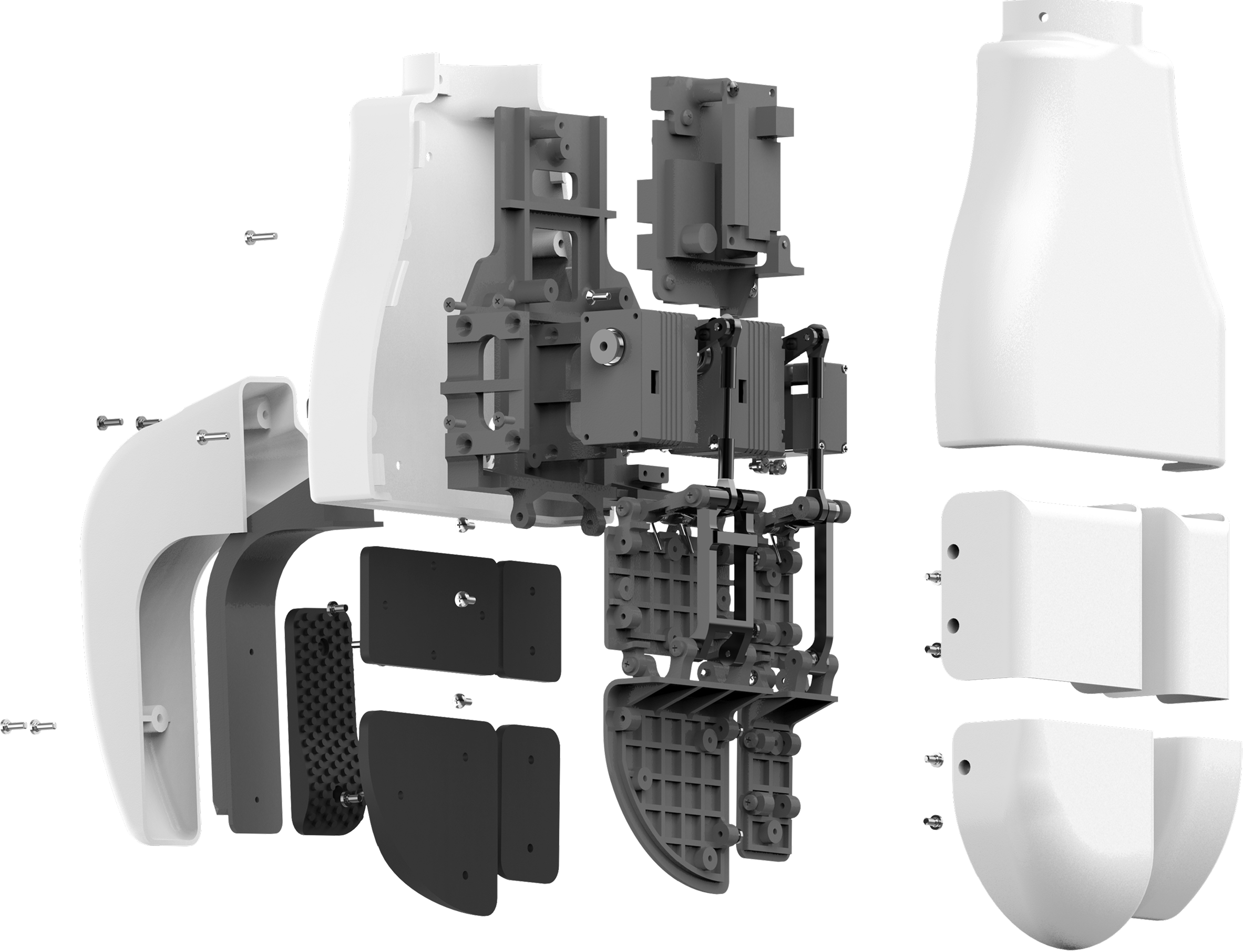
OmniT-Hand 在几乎相同的物料成本下,实现柔性包络抓取。手指自动包裹物体,多点接触稳定握持。同时具备对掌形态,动作更拟人,应用场景从工业延伸至服务、农业、科研。
OmniT-Hand VS 五指灵巧手
减「本」不减力,从「繁」到「简」的转变
OmniT-Hand 仅用3个舵机+欠驱动四连杆,整手BOM成本不足千元,仅为五指手的几十分之一。扭簧与连杆构成的被动柔顺机制,天然抗冲击、适应物体形状,无需力控算法即可安全抓取。

社区支持
文档中心
了解更多开源项目,探索更多开源技术资料,助力快速复现与灵活二次开发,加速创新实践落地。
活动中心
参与社区组织的丰富活动,在互动中收获成长与认可,拓展视野、积累经验、提升影响力,还能获得社区激励!
社区论坛
加入社区讨论,与开发者分享实战经验,在合作交流中激发灵感,互助解决技术难题。
Copyright 2025 人形机器人(上海)有限公司版权所有
Copyright © 2025 OPENLOONG. All rights reserved.